Pendulum plotting solution#
A pendulum is another harmonic oscillator, but you have to linearize the equation of motion. The simple pendulum equation of motion is as such
\(\ddot{\theta} = -\frac{g}{L}\sin\theta\)
where \(g\) is acceleration due to gravity and \(L\) is the length of the pendulum.
Linearize equation of motion#
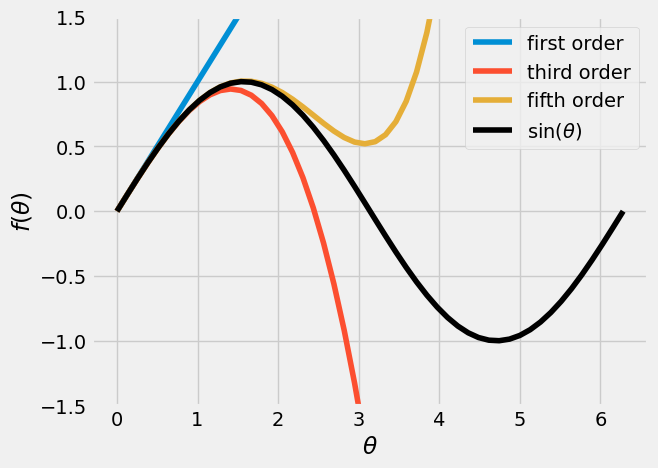
You can’t integrate this equation of motion, so you can take a Taylor series expansion
\(\sin\theta = \theta - \frac{\theta^3}{3!} + \frac{\theta^5}{5!} + ...\)
Now, you can use the first term in the series to create the harmonic oscillator equation
\(\ddot{\theta} = -\omega^2 \theta = -\frac{g}{L} \theta\)
where \(\omega = \sqrt{\frac{g}{L}}\).
You can see how these Taylor series terms diverge from the actual \(\sin\) function below.
Plot the solution for the linearized simple pendulum#
The solution to the harmonic oscillator is given as such
\(\theta(t) = \theta_0 \cos\omega t + \frac{\dot{\theta}_0}{\omega}\sin\omega t\)
where \(\theta_0\) is the initial angle of the pendulum and \(\dot{\theta}_0\) is the initial angular velocity of the pendulum (+ counter-clockwise/ - clockwise motion).
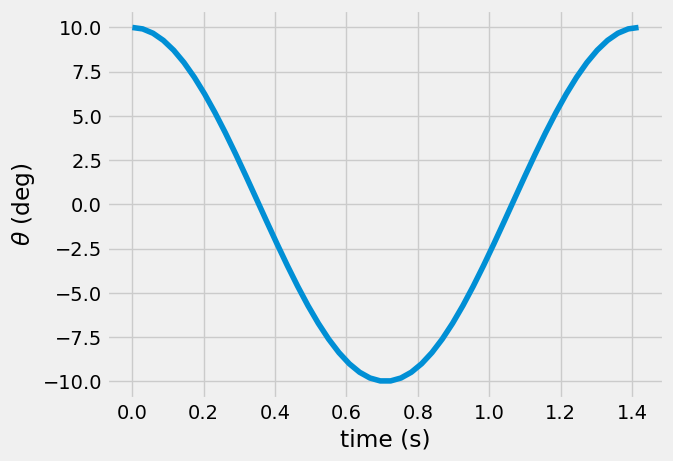
Below, you plot the solution for 1 period of motion for a L = 0.5-m pendulum released from rest at \(\theta_0 = 10^o = \frac{\pi}{18}~rad\).
Note: the time period, \(T=\frac{2\pi}{\omega}~s\) is the time for to move right-to-left, then left-to-right, to its initial position.
L = 0.5 # m
w = np.sqrt(9.81/L)
t = np.linspace(0, 2*np.pi/w)
theta = np.pi/18*np.cos(w*t)
plt.plot(t, theta*180/np.pi)
plt.xlabel('time (s)')
plt.ylabel(r'$\theta$ (deg)')
Text(0, 0.5, '$\\theta$ (deg)')
Motion of the pendulum#
The solution plotted above is the orientation of the pendulum. The position of the mass is
\(\mathbf{r} = L\hat{e}_r = L(\sin\theta \hat{i} - \cos\theta \hat{j})\)
where \(\theta = \theta(t)\) that you created above. Below, you plot the x- and y- positions of the simple pendulum.
r = L*np.vstack([np.sin(theta), -np.cos(theta)])
plt.plot(t, r[0,:], label = 'x-location')
plt.plot(t, r[1,:], label = 'y-location')
plt.xlabel('time (s)')
plt.ylabel('position (m)')
Text(0, 0.5, 'position (m)')
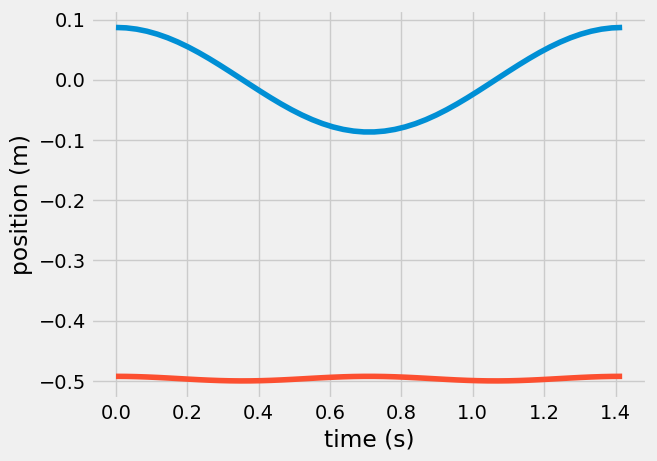
Note: Notice how the x-position has a similar shape to the solution for \(\theta(t)\), but the y-position has very little variation. The angle \(\theta\) is small, \(\theta<<1\), so you can approximate the position as
\(\mathbf{r} = L(\sin\theta \hat{i} - \cos\theta \hat{j}) \approx L\theta\hat{i} - L\hat{j}\)
because the Taylor series expansion for \(\cos(\theta)\) is
\(\cos\theta = 1 - \frac{x^2}{2!} + \frac{x^4}{4!} + ...\)
so you can approximate \(\cos\theta \approx 1\).
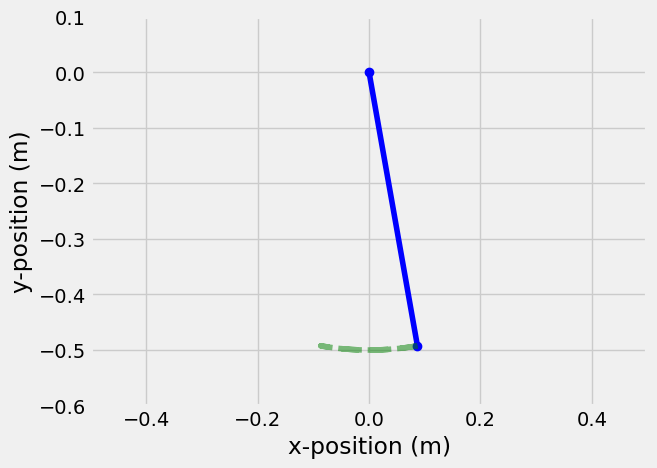
Animation of the pendulum motion#
Here, you can see how the pendulum swings. It starts at \(\theta_0=10^o\) and swings left to \(\theta(t=T/2)=-10^o\). In this simple pendulum model, you did not include any effects of air resistance, friction, or damping so the motion will continue to oscillate until acted upon by another system.
Wrapping up#
In this notebook, you plotted the solution for a simple pendulum and used the kinematic definitions to plot the motion of the pendulum.