Happy Valentine’s Linkage#
In this notebook, you step through the process of defining the kinematics of a four-bar linkage that can draw a heart. Kinematics is the study of the geometry of motion. In this notebook, you predict and draw the geometry of three moving links. To create this solution you will:
solve a series of nonlinear equations using
fsolveuse solutions to create 2D arrays that vary in time and location
plot and animate the motion of the four-bar linkage
When you accomplish these steps you will learn:
How to set up and solve nonlinear equations
How to describe position and orientation
How to use NumPy, Scipy, and Matplotlib to create HTML animations
Why four-bar linkages are so cool
Background#
The four-bar linkages consist of 3 moving parts connected to a stationary support. Depending upon the desired output motion, you can vary the lengths of each moving arm, \(l_1,~l_2,~and,l_3\), and the support locations, \(d_x~and~d_y\). A four-bar linkage is an amazing 1-degree-of-freedom system. If one angle is fixed, all of the positions and angles have to be fixed too. Using some trigonometry, you can arrive at these two constraint equations that relate \(\theta_1,~\theta_2,~and~\theta_3\):

\(l_1\sin\theta_1+l_2\sin\theta_2-l_3\sin\theta_3 -d_y = 0\)
\(l_1\cos\theta_1+l_2\cos\theta_2-l_3\cos\theta_3 -d_x = 0\)
If you have one of the angles, e.g. \(\theta_1\), you use equations 1 and 2
to solve for the other two angles, \(\theta_2~and\theta_3\). Here you can
create a function and
use fsolve. The function input is a vector with two values and the output is a
vector with two values.
\(\bar{f}(\bar{x})= \left[\begin{array}{c} f_1(\theta_2,~\theta_3) \\ f_2(\theta_2,~\theta_3)\end{array}\right]=\left[\begin{array}{c} l_1\sin\theta_1+l_2\sin\theta_2-l_3\sin\theta_3 -d_y\\ l_1\cos\theta_1+l_2\cos\theta_2-l_3\cos\theta_3 -d_x \end{array}\right]\)
Defining your system#
The heart-drawing linkage system has the following properties:

link 1: \(l_1 = 1~m\)
link 2: \(l_2 = 1~m\)
link 3: \(l_3 = 1~m\)
support: \(d_x=0.95~m~and~d_y=0~m\)
The constraint function is defined below as Fbar, a function of
\(\theta_1\) and an array of \([\theta_2,~\theta_3]\) as such,
l1 = 1
l2 = 1
l3 = 1
a1 = np.pi/2
dy = 0
dx = 0.95
Fbar = lambda a1,x: np.array([l1*np.sin(a1)+l2*np.sin(x[0])-l3*np.sin(x[1])-dy,
l1*np.cos(a1)+l2*np.cos(x[0])-l3*np.cos(x[1])-dx])
Solve for one configuration#
Now, solve Fbar using
scipy.optimize.fsolve.
The inputs are a function, Fbar, and an initial guess, x0. You have
to use lambda again to set the angle \(\theta_1\) as a1 = np.pi/2
a1 = np.pi/2
x0 = np.array([0,np.pi/2])
xsol = fsolve(lambda x: Fbar(a1, x), x0)
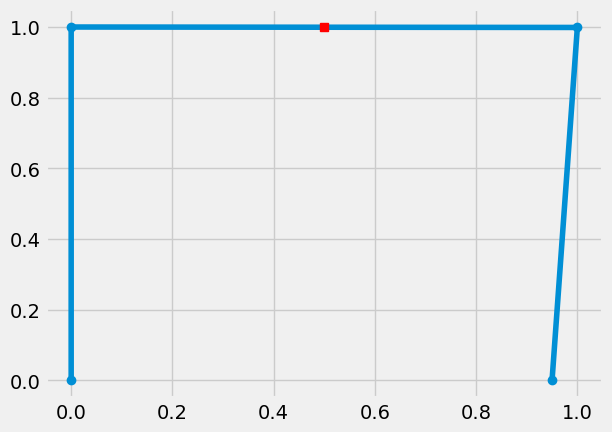
The configuration for \(\theta_1=\frac{\pi}{2}\) is now saved in xsol.
To look at the system in this state, define the positions of each hinge
and the center of link 2 as such,
x- and y-locations of hinges:
\(rx = \left[\begin{array}~0\\l_1\cos(\theta_1)\\l_1\cos(\theta_1)+l_2\cos(\theta_2)\\ l_1\cos(\theta_1) + l_2\cos(\theta_2)-l_3\cos(\theta_3)\end{array}\right]\)
\(ry = \left[\begin{array}~0\\l_1\sin(\theta_1)\\l_1\sin(\theta_1)+l_2\sin(\theta_2)\\ l_1\sin(\theta_1)+l_2\sin(\theta_2)-l_3\sin(\theta_3)\end{array}\right]\)
x- and y-location of point P:
\(rx = \left[\begin{array}~l_1\cos(\theta_1)+l_2\cos(\theta_2)\end{array}\right]\)
\(ry = \left[\begin{array}~l_1\sin(\theta_1)+l_2\sin(\theta_2)\end{array}\right]\)
In the Python cell, you define rx and ry to draw the three moving
links and rpx and rpy that define point P as such,
rx = np.array([0,
l1*np.cos(a1),
l1*np.cos(a1)+l2*np.cos(xsol[0]),
l1*np.cos(a1)+l2*np.cos(xsol[0])-l3*np.cos(xsol[1])])
ry = np.array([0,
l1*np.sin(a1),
l1*np.sin(a1)+l2*np.sin(xsol[0]),
l1*np.sin(a1)+l2*np.sin(xsol[0])-l3*np.sin(xsol[1])])
rpx = l1*np.cos(a1)+l2/2*np.cos(xsol[0])
rpy = l1*np.sin(a1)+l2/2*np.sin(xsol[0])
plt.plot(rx,ry,'o-')
plt.plot(rpx,rpy,'rs')
#plt.axis([-0.5, 1.5, -0.6, 0.6])
[<matplotlib.lines.Line2D at 0x7fde9394ab10>]
Solve for the whole cycle#
You have verified the solution works for one angle, a1. Now, you can
create an array of a1 and solve for the angles at each configuration
as you rotate link 1.
define
a1as alinspaceinitialize
a2anda3as zeros witha1.shapeuse a for-loop to
fsolveeach anglea2anda3givena1save the values of
a2anda3in each step
a1 = np.linspace(-np.pi/2,3*np.pi/2,500)
a2 = np.zeros(a1.shape) # initialize
a3 = np.zeros(a1.shape) # initialize
for i, a in enumerate(a1):
xsol = fsolve(lambda x: Fbar(a,x), xsol) # solve
a2[i] = xsol[0] # save value for a2
a3[i] = xsol[1] # save value for a3
Verify cycle solution#
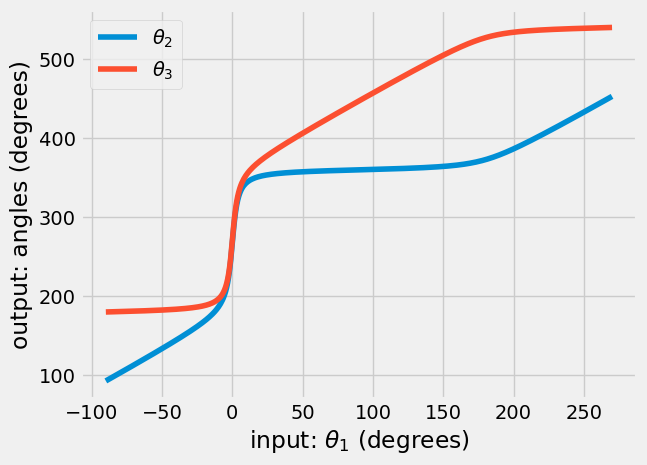
Now, you can see how the functions, \(\theta_2=f_{\theta_2}(\theta_1)\) and \(\theta_3=f_{\theta_3}(\theta_1)\). This is another verification step, to see if there are any discontinuities in the solution that could cause problems.
plt.plot(a1*180/np.pi, a2*180/np.pi, label = r'$\theta_2$')
plt.plot(a1*180/np.pi, a3*180/np.pi, label = r'$\theta_3$')
plt.legend()
plt.xlabel(r'input: $\theta_1$ (degrees)')
plt.ylabel('output: angles (degrees)')
Text(0, 0.5, 'output: angles (degrees)')
Time to animate#
Now, you are ready to animate. You have the angles for the entire cycle
of motion for the four-bar linkage. Now, you need to import
matplotlib.animation
and
IPython.display.HTML.
Import functions#
from matplotlib import animation
from IPython.display import HTML
These two functions allow you:
create an animation
display it in a browser
Define lines and paths#
Then, use the solutions for a1, a2, and a3 to plot the hinge
locations and point P as such
rx = np.array([np.zeros(a1.shape),
l1*np.cos(a1),
l1*np.cos(a1)+l2*np.cos(a2),
l1*np.cos(a1)+l2*np.cos(a2)-l3*np.cos(a3)])
ry = np.array([np.zeros(a1.shape),
l1*np.sin(a1),
l1*np.sin(a1)+l2*np.sin(a2),
l1*np.sin(a1)+l2*np.sin(a2)-l3*np.sin(a3)])
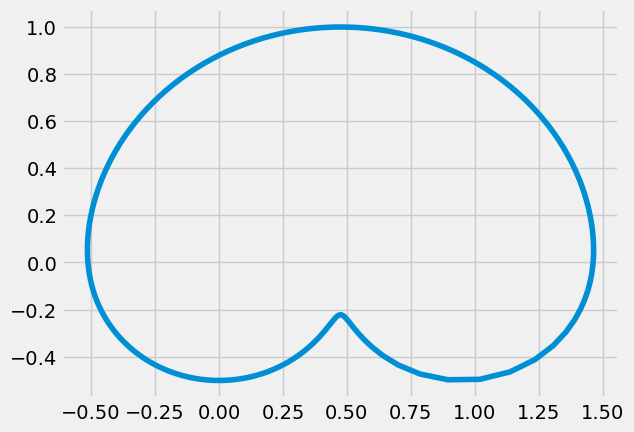
rpx = l1*np.cos(a1)+l2/2*np.cos(a2)
rpy = l1*np.sin(a1)+l2/2*np.sin(a2)
plt.plot(rpx,rpy)
[<matplotlib.lines.Line2D at 0x7fde926c0690>]
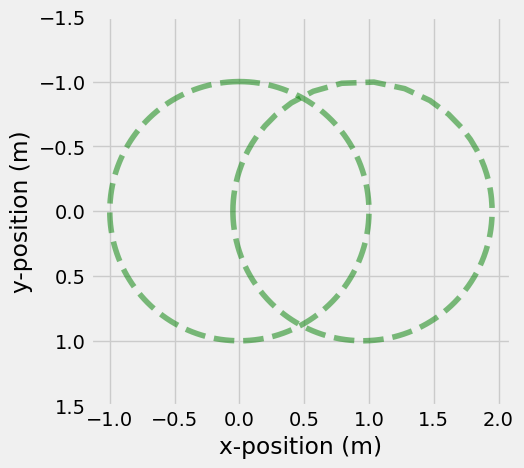
Set up figure and axes#
Plotting just the solution for point P’s path, you see the heart shape is upside-down. In the animation, you can reverse the y-axis to flip the drawing. Here, you set up the figure to create the animation:
ax: axis for plotting the linesline1: lines that draw the three moving linksrxandryline2: line that updates the heart drawing as links move along paths
fig, ax = plt.subplots()
ax.set_ylim((1.5, -1.5))
ax.set_xlabel('x-position (m)')
ax.set_ylabel('y-position (m)')
ax.set_aspect('equal')
line1, = ax.plot([], [],'bo-')
line2, = ax.plot([], [],'r')
ax.plot(rx[1,:],ry[1,:],'g--', alpha=0.5)
ax.plot(rx[2,:],ry[2,:],'g--', alpha=0.5)
[<matplotlib.lines.Line2D at 0x7fde9237f410>]
Define initializing and animation functions#
Create an initializing (init) function that clears the previous
lines
def init():
line1.set_data([], [])
line2.set_data([], [])
return (line1, line2, )
Create an animating (animate) function that updates the lines. The
links should be drawn for a given column, i.e. line1 is defined as
rx[:, i] and ry[:, i], but you want the path of the heart up to the
current frame i.e. line2 is defined as rpx[:i] and rpy[:i].
def animate(i):
'''function that updates the line and marker data
arguments:
----------
i: index of timestep
outputs:
--------
line: the line object plotted in the above ax.plot(...)
'''
line1.set_data(rx[:, i], ry[:,i])
line2.set_data(rpx[:i], rpy[:i])
return (line1, line2 )
Create the animation and display#
Create an animation (anim) variable using the animation.FuncAnimation
anim = animation.FuncAnimation(fig, animate, init_func=init,
frames=range(0,len(a1)), interval=20,
blit=True)
HTML(anim.to_html5_video())
Wrapping up#
There you have it, a heart-drawing four-bar linkage. This solution required arrays, nonlinear solutions, and some trigonometry to build locations of hinges and links.
Try changing the lengths the different links or changing the fixed positions. What else can you draw?