Example: Describing 3D circular motion
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D # noqa: F401 unused import
plt.style.use('fivethirtyeight')
Example: Describing 3D circular motion¶
In this example, a particle is traveling in a circle around an axis set to \(\hat{e}_{rot} = -\frac{1}{\sqrt{2}}\hat{i}+\frac{1}{\sqrt{2}}\hat{k}\).
I create a rotation: \(R_1\) to rotate the unit vector around the \(\hat{j}\)-axis by \(45^o\).
I want to rotate the starting position of the position by \(60^o\) so the particle didn’t start along one of the axes. This rotation is \(R_2\).
alpha = np.pi/4; R1 = np.array([[np.cos(alpha), 0, -np.sin(alpha)],
[0,1,0],
[np.sin(alpha), 0, np.cos(alpha)]])
beta = np.pi/3; R2 = np.array([[np.cos(beta), -np.sin(beta), 0],
[np.sin(beta), np.cos(beta), 0],
[0,0,1]])
Next, I define the angle to go through one cycle,a= \(\theta=0-2\pi\) and defined the \(r'\) and \(v'\) vectors.
a = np.linspace(0,2*np.pi)
rp = np.array([np.sin(a), np.cos(a), np.zeros(a.shape)])
vp = np.array([np.cos(a), -np.sin(a), np.zeros(a.shape)])
Rotating \(\mathbf{r}'\) and \(\mathbf{v}'\) to the desired coordinates required multiplying the rotation matrices as such
\(\mathbf{r} = \mathbf{R_1R_2r}'\)
\(\mathbf{v} = \mathbf{R_1R_2v}'\)
r = rp.copy()
v = vp.copy()
for i in range(0,len(a)):
r[:,i] = R1@R2@rp[:,i]
v[:,i] = R1@R2@vp[:,i]
Then, I print out the values for \(\mathbf{r}(0)\), \(\mathbf{v}(0)\), and \(\mathbf{h}(0)\)
print(1*r[:,0])
print(1*v[:,0])
h = np.cross(r[:,0],v[:,0])
print(h)
[-0.61237244 0.5 -0.61237244]
[0.35355339 0.8660254 0.35355339]
[ 0.70710678 0. -0.70710678]
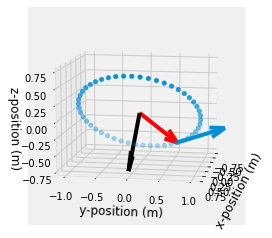
Finally, to give context I plot the motion of the object with the three vectors plotted
\(\mathbf{r}(0)\): red
\(\mathbf{v}(0)\): blue
\(\mathbf{h}(0)\): black
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(r[0,:],r[1,:],r[2,:])
Q1 = ax.quiver(r[0,0],r[1,0],r[2,0], v[0,0],v[1,0],v[2,0])
Q2 = ax.quiver(0,0,0, r[0,0],r[1,0],r[2,0],color='red')
Q3 = ax.quiver(0,0,0,h[0],h[1],h[2],color='black')
ax.view_init(elev=10., azim=10)
ax.set_xlabel('x-position (m)')
ax.set_ylabel('y-position (m)')
ax.set_zlabel('z-position (m)')
Text(0.5, 0, 'z-position (m)')
from matplotlib import animation
from IPython.display import HTML
Create a figure to display the animation and add fixed background the dashed line is added to show the path the end point takes
Create an initializing (
init) function that clears the previous line and marker
def init():
Q1.set_UVC([], [], [])
Q2.set_UVC([], [], [])
Q3.set_UVC([], [], [])
return (Q1, Q2, Q3,)
Create an animating (
animate) function that updates the line
def animate(i):
'''function that updates the line and marker data
arguments:
----------
i: index of timestep
outputs:
--------
line: the line object plotted in the above ax.plot(...)
marker: the marker for the end of the 2-bar linkage plotted above with ax.plot('...','o')'''
Q1.set_UVC = ax.quiver(r[0,i],r[1,i],r[2,i], v[0,i],v[1,i],v[2,i])
Q2.set_UVC = ax.quiver(0,0,0, r[0,i],r[1,i],r[2,i],color='red')
h = np.cross(r[:,i],v[:,i])
Q3.set_UVC = ax.quiver(0,0,0,h[0],h[1],h[2],color='black')
return (Q1, Q2, Q3, )
Create an animation (
anim) variable using theanimation.FuncAnimation
anim = animation.FuncAnimation(fig, animate, #init_func=init,
frames=range(0,len(a)), interval=100,
blit=False)
HTML(anim.to_html5_video())