Embedding technique: solution of link pinned to ground at origin
Contents
import numpy as np
from numpy import sin,cos,pi
from scipy.linalg import *
from scipy.optimize import fsolve,root
from scipy.integrate import solve_ivp
import matplotlib.pyplot as plt
plt.style.use('fivethirtyeight')
Embedding technique: solution of link pinned to ground at origin¶
Overview: embedding technique¶
The embedding technique is a generalized method to solve for the dynamic response in a system of moving parts. The generalized coordinates are separated into dependent and independent coordinates as such
\(\mathbf{q} = [\mathbf{q}_d,~\mathbf{q}_i]\).
This distinction creates \(n-n_c\) second order differential equations, where \(n=3\times(\#~bodies)\) and \(n_c=number~of~constraints\). The equations of motion are as such
\(\mathbf{B^TMB +B^TM\gamma-B^TQ_e = 0}\)
where,
\(\mathbf{B}=\left[\begin{array}-\mathbf{C_{q_d}^{-1}C_{q_i}} \\\bar{I}\end{array}\right]\)
\(\gamma = \left[\begin{array} ~\mathbf{-C_{q_d}^{-1}[(C_q\dot{q})_q\dot{q}+2C_{qt}\dot{q}+C_{tt}}] \\ \mathbf{0}\end{array}\right] = \left[\begin{array} ~\mathbf{C_{q_d}^{-1}[Q_d]} \\ \mathbf{0}\end{array}\right]\)
\(\mathbf{C_{q_d}}~and~\mathbf{C_{q_i}}\) are the Jacobian of constraints for dependent and independent coordinates, respectively
System: link pinned to ground¶

In the diagram above, a link is pinned to the point \(r_{pin} = x\hat{i}\). In this notebook, you will
build the a single, second order differential equation using the embedded technique
solve the second order differential equation
plot and animate the result
You will define the following functions:
rotAa 2D rotation matrixA_thetathe derivative ofrotAC_linkthe 2 constraint equations for the link systemCq_pinthe Jacobian of a general pin constraint between 2 rigid bodiesCq_linkthe Jacobian of the link systemd C_link/dqBi_linkthe array \(\mathbf{B}\) that transforms \(\delta \mathbf{q_i}\) to \(\delta \mathbf{q}\)eom_barthe final equation of motion using the embedding technique
Define System constants¶
You will use a 1-meter link with mass, m=0.1 kg.
xA = 0 # pin to the origin
m1 = 0.1 # kg
l1 = 1 # m
Define \(\mathbf{A}\) and \(\mathbf{A}_\theta\)¶
Here, you create two functions to rotate from the body coordinate system at angle \(\theta\) to the global coordinate system. The derivate, \(\mathbf{A}_\theta\) will be used in the Jacobian and equations of motion.
def rotA(theta):
'''This function returns a 2x2 rotation matrix to convert the
rotated coordinate to the global coordinate system
input is angle in radians
Parameters
----------
theta : angle in radians
Returns
-------
A : 2x2 array to rotate a coordinate system at angle theta to global x-y
'''
A=np.zeros((2,2))
A=np.array([[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]])
return A
def A_theta(theta):
'''This function returns a 2x2 rotation matrix derivative
input is angle in radians
Parameters
----------
theta : angle in radians
Returns
-------
dAda : 2x2 array derivative of `rotA`
'''
dAda=np.array([[-np.sin(theta), -np.cos(theta)],
[np.cos(theta), -np.sin(theta)]])
return dAda
Define the constraints \(\mathbf{C}(\mathbf{q},~t)\)¶
There are 2 constraints on the motion and 3 generalized coordinates. The constraint keeps the base of the link at point \(\mathbf{r}_A=x\hat{i}\).
def C_link(q,t):
'''2 constraint equations for 3 generalized coords
q=[R1x,R1y,a1]
q=[R1, a1]
[0,1 2 ]
1/
/ pinned link
O
-----^^^-------------
Parameters
----------
q : numpy array for 9 generalized coordinates for bodies 1-3 in the slider crank
q = [q1]
t : current time
Returns
-------
C : 2 constraint equation evaluations
'''
q1 = q[0:3]
C=np.zeros(2)
C[0:2] = q1[0:2]+rotA(q1[2])@np.array([-l1/2, 0]) - np.array([xA, 0])
return C
Define the Jacobian of constraints \(\mathbf{C}_\mathbf{q}\)¶
There are 2 constraints on the motion and 3 generalized coordinates. The resulting Jacobian is \(2~rows\times 3~columns\). You create a reuseable pin Jacobian (\(2\times 6\)) and use the first three columns in Cq_link.
Define Jacobian of pin constraint as Cq_pin.
def Cq_pin(qi, qj, ui, uj):
'''Jacobian of a pinned constraint for planar motion
Parameters
----------
qi : generalized coordinates of the first body, i [Rxi, Ryi, thetai]
qj : generalized coordinates of the 2nd body, i [Rxj, Ryj, thetaj]
ui : position of the pin the body-i coordinate system
uj : position of the pin the body-j coordinate system
Returns
-------
Cq_pin : 2 rows x 6 columns Jacobian of pin constraint Cpin
'''
Cq_1=np.block([np.eye(2), A_theta(qi[2])@ui[:,np.newaxis] ])
Cq_2=np.block([-np.eye(2), -A_theta(qj[2])@uj[:,np.newaxis] ])
Cq_pin=np.block([Cq_1, Cq_2])
return Cq_pin
The bar uses the first three columns of the pin-constraint Jacobian in Cq_link.
def Cq_link(q,t):
'''return Jacobian of C_slidercrank(q,t) = dC/dq_i
|dC1/dR1x dC1/dR1y dC1/da3 |
|dC2/dR1x dC2/dR1y dC2/da3 |
Parameters
----------
q : numpy array for 3 generalized coordinates for body 1 in the rotating link
q = [q1]
t : current time
Returns
-------
Cq : 2 rows x 3 columns Jacobian of constraints `C_link`
'''
q1 = q[0:3]
Cq=np.zeros((2,3))
Cq[0:2, 0:3] = Cq_pin(q1, np.array([0, 0, 0]),np.array([-l1/2, 0]),np.array([0, 0]))[0:2, 0:3]
return Cq
The g()-function is added to make changing measurement systems easier. You can change to millimeters and seconds or feet and seconds by calling g('mms') or g('fts'), respectively.
def g(system='ms'):
'''define gravity for m-s, ft-s,mm-s'''
if system=='ms':
return 9.81
elif system=='fts':
return 32.2
elif system=='mms':
return 9.81e3
else:
print('warning: system not defined yet, giving you 9.81 m/s/s')
return 9.81
Here, you create the first function for the embedding techique equations of motion
\(\mathbf{B}=[-\mathbf{C_{q_d}^{-1}C_{q_i}},~\bar{I}]^T\)
is defined as function Bi_link(q, t).
Note: In general, you should never invert an array. This is a very rare case when the inverse is strictly necessary. Ideally, you would solve the equation as
x = solve(A, b), rather thanx = inv(A)@b. In this particular case, \(\mathbf{C_{q_d}}=\mathbf{I}\), so the inverse is \(\mathbf{I}^{-1} = \mathbf{I}\).
def Bi_link(q, t):
'''B.T*M*B-B.T*Qe = 0 '''
Cq = Cq_link(q, t)
Cqd=Cq[0:2,0:2]
Cqi=Cq[0:2,2].reshape(2,1)
#print(-np.linalg.inv(Cqd)@Cqi)
Bi=np.vstack((-np.linalg.inv(Cqd)@Cqi,np.eye(1)))
return Bi
Solution¶
Solution process:
define a
globalvariableq0that updates the initial guess for \(\mathbf{C}(\mathbf{q},~t)=\mathbf{0}\)Use state \(y=[\theta^1,~\dot{\theta}^1]\) to add constraints to \(\mathbf{C}(\mathbf{q},~t)\)
solve for \(y(t)\) using
solve_ivpplug into \(y(t)\) into
eom_barto get generalized coordinates \(\mathbf{q}(t)\)
Define equation of motion¶
The equation of motion for the general embedding method is as such
\(\mathbf{B^TMB +B^TM\gamma-B^TQ_e = 0}\)
\(\gamma = \left[\begin{array} \mathbf{-C_{qd}^{-1}[(C_q\dot{q})_q\dot{q}+2C_{qt}\dot{q}+C_{tt}}] \\ \mathbf{0}\end{array}\right] = \left[\begin{array} \mathbf{C_{qd}^{-1}[Q_d]} \\ \mathbf{0}\end{array}\right]\)
where \(\mathbf{B}=\mathbf{B(q)}\) and \(\mathbf{\gamma = \gamma}(\mathbf{q,~\dot{q},}~t)\). This presents a system of differential algebraic equations. You need to solve for \(\mathbf{q}\) and \(\dot{\mathbf{q}}\) at each step. The one-bar linkage contraints do not invlove time-dependent terms so \(\mathbf{\gamma}=\mathbf{0}\).
Define equation of motion to return \(\dot{y}=[\dot{\theta}^1,~\ddot{\theta}^1]^T\) and \(\mathbf{q}= [R_x^1,~R_y^1,~\theta^1]^T\), where \(y=[\theta^1,~\dot{\theta}^1]^T\).
The equation of motion has a number of steps to get to the final result. Notice the solution for q. The values of \(q_1=R_x^1\) and \(q_2=R_y^1\) depend upon \(q_3=\theta^1\), but \(\theta^1\) is the unknown independent generalized coordinate.
q = fsolve(lambda q: np.block([C_link(q, t), q[2] - y[0]]), q0, \
fprime= lambda q: np.vstack((Cq_link(q,t), np.array([0,0,1]))))
This fsolve solution creates a third constraint that \(\theta^1 =\) y[0] the first state variable. The added constraint changes the dimensions of the Jacobian
\(\mathbf{C}(\mathbf{q},~t) = \left[\mathbf{R}^1+\mathbf{Au}_A-\mathbf{r}_A \right] \rightarrow \left[\begin{array}{c}~\mathbf{R}^1+\mathbf{Au}_A-\mathbf{r}_A \\ \theta^1 - y[0] \end{array} \right]\)
\(\mathbf{C}_\mathbf{q} = \left[\begin{array}{c}~1 & 0 & \frac{l^1}{2}\sin\theta^1 \\ 0 & 1 & -\frac{l^1}{2}\cos\theta^1 \end{array} \right] \rightarrow \left[\begin{array}{c}~1 & 0 & \frac{l^1}{2}\sin\theta^1 \\ 0 & 1 & -\frac{l^1}{2}\cos\theta^1 \\ 0 & 0 & 1 \end{array}\right]\)
The function eom_bar calculates
-dy: \(\frac{dy}{dt}\)
-q: \(\mathbf{q}\).
q0=np.array([l1/2, 0, 0])
def eom_bar(t, y, li = l1, mi = m1):
'''
Parameters
----------
ti : current time
y : numpy array for independent generalized coordinates for body 1 in the rotating link
y = [theta, dtheta/dt]
global parameter:
-----------------
q0 : initial guess to solve C(q, t) equations
Returns
-------
dy : derivative for the independent generalized coordinate for body 1
dy = [dtheta/dt, ddtheta/ddt]
'''
global q0
q0[2]=y[0]
q = fsolve(lambda q: np.block([C_link(q, t),q[2]-y[0]]),q0, \
fprime= lambda q: np.vstack((Cq_link(q,t),np.array([0,0,1]))))
Bi = Bi_link(q, t)
M = np.diag([mi,mi,mi*li**2/12])
Qe = np.array([0, -mi*g(), 0])
dy = np.zeros(y.shape)
dy[0] = y[1]
dy[1] = solve(Bi.T@M@Bi,Bi.T@Qe)
return dy, q
Solve for \(\theta^1(t)\)¶
The value of \(\mathbf{q}\) is needed to calculate \(\mathbf{C_q}\) and \(\mathbf{B}\), but in the first pass to get a solution for the \(\theta^1(t)\), you ignore the values of q by indexing the eom_bar function as such
lambda t, y: eom_bar(t, y)[0] # <-- only grab the first output from eom_bar
You will solve for the motion of the link starting from rest with initial conditions, \([\theta,~\dot{\theta}] = [0~rad,~0~rad/s]\).
t = np.linspace(0,4)
sol=solve_ivp(lambda t, y: eom_bar(t, y)[0],
t_span = [0,t.max()],
y0 = [0, 0],
t_eval = t)
Verify work¶
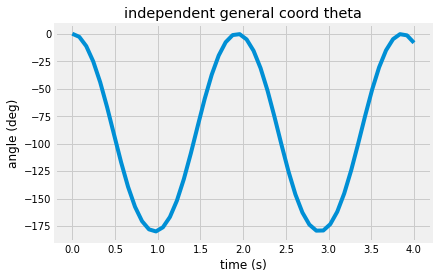
You should expect oscillations with magnitude \(180^o\) around the equilibrium position at \(-90^o\).
plt.plot(sol.t,sol.y[0]*180/np.pi)
plt.xlabel('time (s)')
plt.ylabel('angle (deg)')
plt.title('independent general coord theta')
Text(0.5, 1.0, 'independent general coord theta')
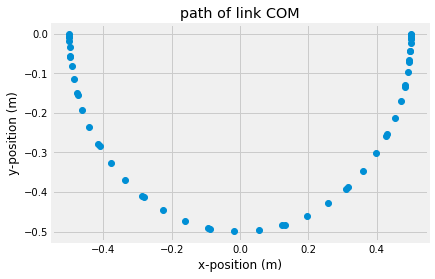
Solve for \(\mathbf{q}(t)\)¶
Plug in the solution sol.y for \(\mathbf{q}\) as a function of time to get the other generalized coordinates.
q=np.zeros((3,len(t)))
for i,ti in enumerate(t):
dy, qi = eom_bar(ti,sol.y[:,i])
q[:,i] = qi
plt.plot(q[0,:],q[1,:], 'o')
plt.xlabel('x-position (m)')
plt.ylabel('y-position (m)')
plt.title('path of link COM')
Text(0.5, 1.0, 'path of link COM')
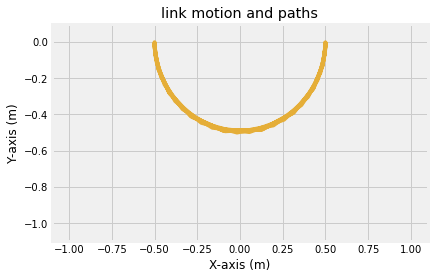
Animate the motion¶
Next, you animate the motion of the system. Below, you create
plot_shapeto create lines and markers to represent links and the sliding basea figure that shows the path of the two link centers of mass 3.
initto initialize the animationanimateto update the two links and sliding baseFuncAnimationto display the motion of the slidercrank system
def plot_shape(shape,dims,q):
'''
function to plot a shape based upon the shape dimensions and coordinates
arguments:
----------
shape: either 'link' or 'base',
- the link returns two points to plot as a line
- the base returns one point to plot as a marker
- if neither 'link' or 'base' are chosen, then 0 is returned and warning printed
`choose a \'link\' or \'base\' please`
dims: the dimensions of the shape
- the link uses the first value as the length
- the base ignores the `dims`
q: generalized coordinates in the form [Rx, Ry, theta]
- the link returns the center of the link at (Rx, Ry) and oriented at theta
- the base returns the center at (Rx, Ry) and ignores theta
returns:
--------
datax: coordinates to plot the x-positions
datay: coordinates to plot the y-positions
- the link returns array of length 2
- the base returns array of length 1
'''
if shape=='link':
left = rotA(q[2])@np.array([-dims[0]/2, 0])
right = rotA(q[2])@np.array([dims[0]/2, 0])
Px=q[0]+np.array([left[0], right[0]])
Py=q[1]+np.array([left[1], right[1]])
datax = Px
datay = Py
#l,= plt.plot(Px,Py,'o-')
return datax, datay
elif shape=='base':
Px=q[0]
Py=q[1]
data = [Px, Py]
#l,=plt.plot(Px,Py,'s',markersize=20)
return data
else:
print('choose a \'link\' or \'base\' please')
return 0
2. initialize the lines and coordinate system¶
q1 = q[0:3, :]
fig, ax = plt.subplots()
link1, = ax.plot([], [], linewidth = 10)
body3, = ax.plot([], [], 's', markersize = 20)
path1, = ax.plot(q1[0, :], q1[1, :])
ax.set_xlim((-1.1,1.1))
ax.set_ylim((-1.1, 0.1))
ax.set_xlabel('X-axis (m)')
ax.set_ylabel('Y-axis (m)')
ax.set_title('link motion and paths')
Text(0.5, 1.0, 'link motion and paths')
3. and 4. create your init and animation functions to update the lines on the plot¶
Create an initializing (init) function that clears the previous lines and markers
Create an animating (animate) function that updates the link, base, and path
def init():
link1.set_data([], [])
return (link1, )
def animate(i):
'''function that updates the line and marker data
arguments:
----------
i: index of timestep
outputs:
--------
link1: the line object plotted in the above ax.plot(...)
'''
datax, datay = plot_shape('link', np.array([l1]), q1[:, i])
link1.set_data(datax, datay)
return (link1, )
4. display the result in an HTML video¶
Import the animation and HTML functions. Then, create an animation (anim) variable using the animation.FuncAnimation
from matplotlib import animation
from IPython.display import HTML
anim = animation.FuncAnimation(fig, animate, init_func=init,
frames=range(0,len(t)), interval=50,
blit=True)
HTML(anim.to_html5_video())