Spring-mass harmonic oscillator
Part one - setting up numerical integration
note: there's some numerical issues that come up
Part two - getting numerical integration up and running
note: ironed out some numerical issues with some hacks
In this notebook, we solve the harmonic oscillator functions for position and velocity given the differential equation,
$$\ddot{x} = -\frac{k}{m}x$$
and initial conditions
$$x_0 = 2~m$$
$$v_0 = 0~m/s$$
import OrdinaryDiffEq as ODEusing Plotsbegin
k = 100
m = 1
ω = sqrt(k/m)
x0 = 2
v0 = 0
tspan = (0, 4*pi/ω)
A = x0
B = v0/ω
end0.0
function harmonicoscillator(ddu, du, u, ω, t)
ddu .= -ω^2 * u
end
#Pass to solversharmonicoscillator (generic function with 1 method)
prob = ODE.SecondOrderODEProblem(harmonicoscillator,
[v0],
[x0],
tspan,
ω)�[38;2;86;182;194mODEProblem�[0m with uType �[38;2;86;182;194mRecursiveArrayTools.ArrayPartition{Int64, Tuple{Vector{Int64}, Vector{Int64}}}�[0m and tType �[38;2;86;182;194mFloat64�[0m. In-place: �[38;2;86;182;194mtrue�[0m
Non-trivial mass matrix: �[38;2;86;182;194mfalse�[0m
timespan: (0.0, 1.2566370614359172)
u0: ([0], [2])
sol = ODE.solve(prob, ODE.DPRKN6(), reltol = 0.000001)retcode: Success
Interpolation: specialized 6th order interpolation
t: 92-element Vector{Float64}:
0.0
2.893672764104888e-7
4.3094596785332467e-7
1.8467328822816834e-6
1.6004602026565272e-5
0.00015758329346940116
0.0014529231474200764
⋮
1.1807107739201608
1.1957894812241363
1.211284708209366
1.2273170540954124
1.2440413926419842
1.2566370614359172
u: 92-element Vector{RecursiveArrayTools.ArrayPartition{Float64, Tuple{Vector{Float64}, Vector{Float64}}}}:
([0.0], [2.0])
([-5.335295034665839e-5], [1.9999999999929348])
([-8.16686886350626e-5], [1.9999999999833766])
([-0.0003648260715007362], [1.999999999667306])
([-0.0031963998867704548], [1.9999999744576202])
([-0.03151212515060508], [1.9999975174634315])
([-0.2905698858976265], [1.9997889117140084])
⋮
([13.767742522230476], [1.450686959484666])
([11.432353471744767], [1.6410401997523374])
([8.762715675381127], [1.7978176037641544])
([5.7803484319394], [1.9146476743203364])
([2.512482455129625], [1.9841558195004614])
([4.497230755504963e-6], [1.9999999992350599])
t = sol.t # extracting time from solution92-element Vector{Float64}:
0.0
2.893672764104888e-7
4.3094596785332467e-7
1.8467328822816834e-6
1.6004602026565272e-5
0.00015758329346940116
0.0014529231474200764
⋮
1.1807107739201608
1.1957894812241363
1.211284708209366
1.2273170540954124
1.2440413926419842
1.2566370614359172
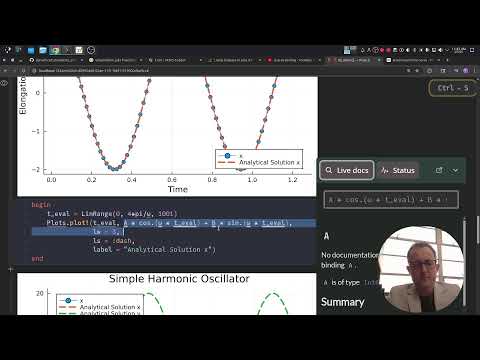
plot(sol.t, sol[2,:],
linewidth = 1,
marker = 'o',
title = "Simple Harmonic Oscillator",
xaxis = "Time",
yaxis = "Elongation",
label = "x")
begin
t_eval = LinRange(0, 4*pi/ω, 1001)
plot!(t_eval, A * cos.(ω * t_eval) + B * sin.(ω * t_eval),
lw = 3,
ls = :dash,
label = "Analytical Solution x")
end
Lagrange definition
The Principle of least action states that the difference between kinetic, \(T\), and potential, \(V\), energy must be minimized given the forces and constraints a system.
$$L = T-V$$
$$\min_{q(t),~\dot{q}(t)} \int_{t_1}^{t_2} T(q, \dot{q})dt$$
In this case, the kinetic and potential energy is as such
$$T = \frac{1}{2}mv(t)^2$$
$$V = \frac{1}{2}kx(t)^2$$
where \(x(t)\) and \(v(t)\) are functions that we just solved for with the first differential equation.
begin
v = sol[1,:]
x = sol[2,:]
T = 1/2 .* m .* v.^2
V = 1/2 .* k .* x.^2
L = T .- V
plot(t, T, label = "KE")
plot!(t, V, label = "PE")
plot!(t, L, label = "Action")
end
Integrating the action in the system
In the next step, we can use the exact equations or the numerical solutions to calculate action, \(L\), and integrate over the time period we considered.
$$\int_{t_1}^{t_2} T(q, \dot{q})dt \approx \sum_{i=1..N} T(q_i,\dot{q}_i)\Delta t_i$$
where \(N\) is the number of timesteps we solved and \(\Delta t_i\) is the size of each timestep.
According to the principle of least action, the number we calculate should be the minimum.
function integrate_action(L, t)
L_dt = L[1:end-1].*(t[2:end]- t[1:end-1])
return sum(L_dt)
endintegrate_action (generic function with 1 method)
integrate_action(L, t)-0.5880345378239729
Try your own functions
Test the math behind this claim that we have found the functions of least action. What other functions satisfy the initial conditions?
begin
v_an = ω * (-A * sin.(ω * t) + B * cos.(ω * t))
x_an = A * cos.(ω * t) + B * sin.(ω * t)
T_an = 1/2 .* m .* v_an.^2
V_an = 1/2 .* k .* x_an.^2
L_an = T_an .- V_an;
end92-element Vector{Float64}:
-200.0
-199.99999999665067
-199.99999999257145
-199.9999998635831
-199.99998975410864
-199.99900670104697
-199.91556651462108
⋮
-10.449355467669122
-69.30137833647011
-123.2148847639518
-166.58762174537424
-193.68745432688002
-200.0
integrate_action(L_an, t)-0.5880349011287564
Built with Julia 1.12.4 and
OrdinaryDiffEq 6.106.0Plots 1.41.3
To run this tutorial locally, download this file and open it with Pluto.jl.